LEG-SLAM
LEG-SLAM: Real-Time Language-Enhanced Gaussian Splatting for SLAM
Overview
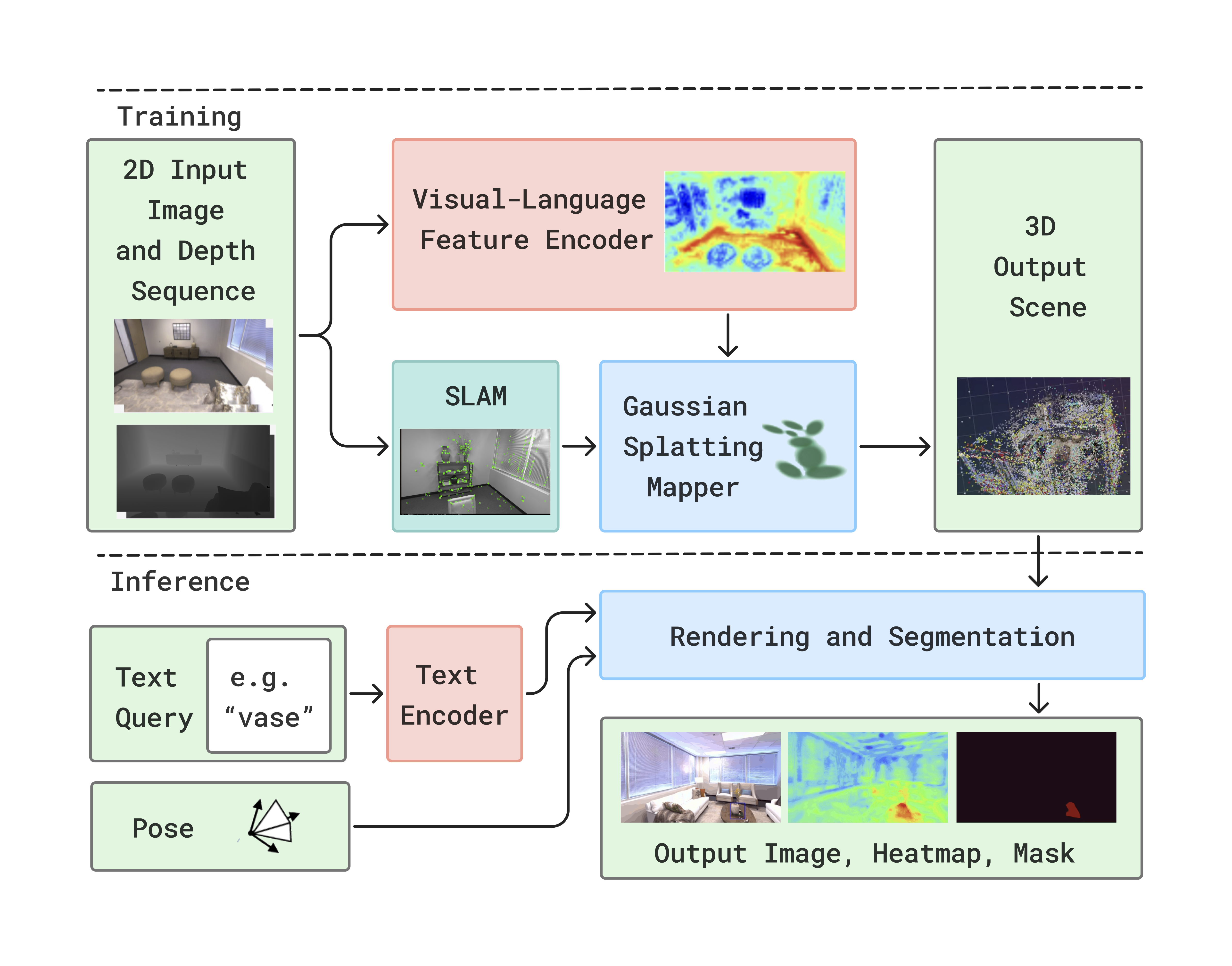
LEG-SLAM is an open-vocabulary 3D SLAM system integrating 3D Gaussian Splatting with DINOv2 feature extraction, allowing real-time semantic scene understanding.
🔹 10 FPS on Replica, 18 FPS on ScanNet
🔹 Real-time 3D Reconstruction with Gaussian Splatting
🔹 Text-based Semantic Queries using Talk2DINO
🔹 Efficient Feature Compression via PCA
📜 Paper
Under Review at ICCV 2025. Stay tuned for updates!
🚀 Code Release
Code will be released after paper acceptance.